随着现代化社会生活和生产节奏的加快,智能物流、智能生产将逐步取代传统生产模式,随着生产工具的智能化升级、改造,与之配合使用的物流系统也需要智能化升级来适应生产需求。
以AGV为输送载体的装配线保留了传统流水作业生产线的输送功能,并可以根据需要设置装配支线,装配线可不受束缚实现交叉。生产线的改造、搬迁比较容易。
一、拖拉机装配线生产现状
现有的拖拉机生产线绝大部分采用地板链作为装配线输送载体
主要缺点:1.装配工位间距调整费时、费力。2.板链施工土建量大。3.路线改变和迁移难度和工作量大。4.较难实现装配支线和主线间的衔接和路线交叉。
二、AGV装配线(图三)的技术分析
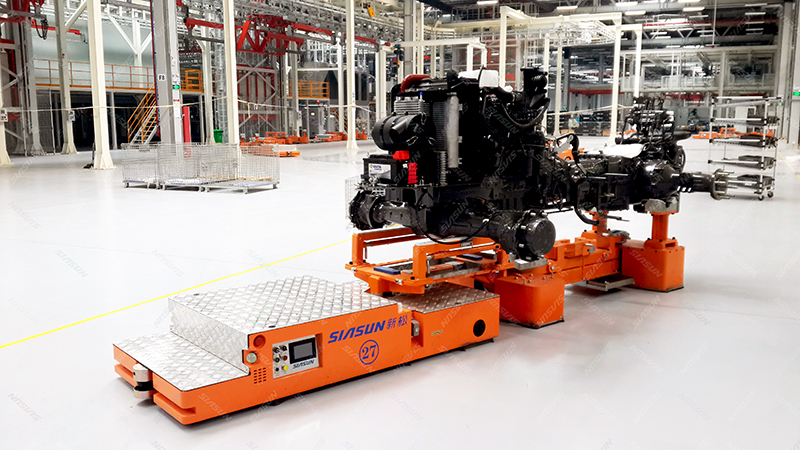
- 工艺流程:拖拉机底盘在底盘线人工上线(落到AGV拖车上),底盘线按照装配工艺可设若干工位,AGV依次经过装配工位,然后到达喷漆线入口,自动起吊设备将底盘吊起进入喷漆线,并将喷漆后的地盘吊装到AGV上,AGV继续前进进入最终线(总装配线),最终线可设若干装配工位,AGV依次经过装配工位,最后AGV进入下线位后举升机将拖拉机举起,AGV返回,举升机落下人工下线。
- AGV系统简介:
非接触供电AGV系统由AGV车、供电系统、调度控制系统、无线通讯系统、人工任务系统构成。
AGV车:AGV车按照工序要求,可以自动完成物料转运工作。 AGV车(图五)主要由车载控制器、伺服驱动系统、导航系统、安全系统、供电系统、通讯系统等部分构成。各个子系统与车载控制器的连接通过CAN总线的方式交换信息,既减少了AGV的线束,又便于系统的维护,同时系统可以很方便地进行裁减。
非接触供电系统:供电系统为AGV提供所需动力,并为AGV提供导航路线。AGV使用非接触供电系统作为供电电源(图六),该种供电方式可以在设定路线段提供不间断供电,使AGV在线24小时连续运行成为了可能。
非接触供电系统将市电380V交流低频50HZ电能变换为25KHZ的中频电,通过感应拾取器,无接触的传输到移动的变换器中,最终输出500VDC供AGV伺服驱动器使用,驱动标准的交流伺服电机,以及24VDC供控制单元使用.
调度控制系统:人机界面,可以直观的察看各AGV的位置、状态。合理高效安全的完成AGV调度。 控制台是AGV系统的调度管理中心,负责数据采集系统的数据处理,与生产管理系统交换信息,生成AGV的运行任务,解决多AGV之间的避碰问题。
无线通讯系统:用以完成控制台与各AGV之间的通讯。控制台依靠无线局域网向AGV发出系统控制指令,任务调度指令,避碰调度指令。控制台同时可接收AGV发出的通讯信号。AGV依靠无线局域网向控制台报告各类指令的执行情况,AGV当前的位置,AGV当前的状态。
导航系统:AGV采用电磁导航技术,以动力电缆作为导航线,经过车体自带磁导航传感器采集磁信号。该传感器结构紧凑、使用简单、导航范围宽、导航精度高、灵敏度高、抗干扰性好。电磁导航传感器采用CAN总线通讯方式,接线少可靠性高。
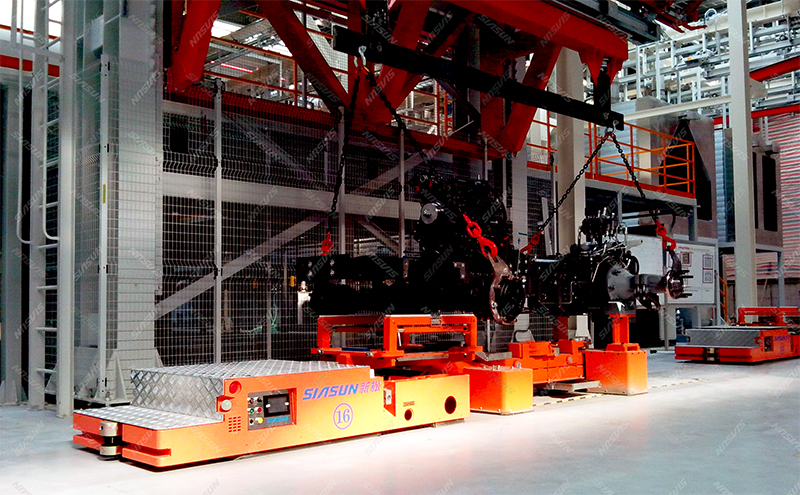
- AGV系统创新点:①AGV外型尺寸小(2000mmx940mmx400mm)、负载大(10吨),适合大负载的工件在空间紧凑的工位间转运;②AGV拖车与AGV的巧妙挂接形式使AGV自重很小(1吨)(图四)能有效节约运行所需能源;③非接触供电模式实现了AGV持续行走中电能的补充、并且地面无导航线、美观大方;④由于AGV运行路线复杂,鉴于对AGV及拖车的位置精度要求较高,采用CAD仿真等手段规划路线,并通过升级控制算法确保AGV及拖车在弯道后的工位点姿态迅速摆正以满足装配工具的装配要求;⑤由于车体采用交流伺服电机,使AGV的低速性能增强,AGV最低可控速度为002m/s,有效的保证了生产最低节拍对运行速度的要求;⑥AGV拖车构造简洁、并可根据拖拉机具体型号设计支撑点和结构,支撑机构可翻转、生产换型时刻人工反转支撑结构,因此可承载多型号的拖拉机装配。
三、结束语
随着工厂自动化、智能化程度越来越高,随之而来的是对自动化物流的需求,AGV作为自动化物流的主要产品需求越来越大,在土地成本较高的年代,小尺寸大负载的AGV需求将持续增加,因此本文所述AGV在工业生产中非常有意义,同时可扩展到其他重型车辆的装配线。





