外部传感器用于机器人对周围环境、目标物的状态特征获取信息,使机器人和环境发生相互作用,从而使机器人对环境有自校正和自适应能力。
1 接近觉传感器
1.1 接触式接近觉传感器
接触式接近觉传感器采用最可靠的机械检测方法,用于检测接触与确定位置。机器人通过微型开关和相应机械装置结合实现接触检测。

移动机器人采用高可靠性的接触式防碰开关
1.2 感应式接近觉传感器
(1)电涡流式接近觉传感器
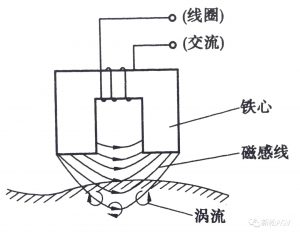
导体在一个不均匀的磁场中运动或处于一个交变磁场中时,其内部就会产生感应电流。这种感应电流称为电涡流,这一现象称为电涡流现象。利用这一原理可以制作电涡流传感器。电涡流式接近觉传感器通过通有交变电流的线圈向外发射高频变化的电磁场,处在磁场周围的被测导电物体就产生了电涡流。由于传感器的电磁场方向相反,两个磁场相互叠加削弱了传感器的电感和阻抗。若用电路把传感器电感和阻抗的变化转换成转换电压,则能计算出目标物与传感器之间的距离。该距离与转换电压成正比,但存在一定的线性误差。对于钢或铝等材料的目标物线性误差为±0.5%。
电涡流传感器外形尺寸小,价格低廉,可靠性高,抗干扰能力强,而且检测精度也高,能够检测到0.02mm的微量位移。但是该传感器检测距离短,一般只能测到13mm以内,且只能对固态导体进行检测,这是其不足之处。
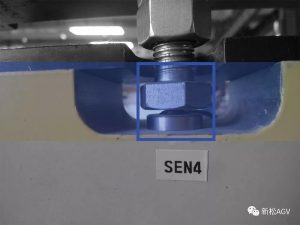
移动机器人采用感应式接近传感器检测举升位置
(2)电容式接近觉传感器
电容式接近觉传感器的结构和原理十分简单,它通过距离变化使电容值发生改变来实现测量。电容式接近觉传感器能对多种金属、非金属及人体进行检测,使用范围较广。与只能检测铁磁材料的感应型接近觉传感器不同,电容式接近觉传感器能够检测所有固体和液体材料。
(3)光电式接近觉传感器

光电式接近觉传感器由用作发射器的光源和接收器两部分组成,光源可以在内部,也可以在外部,接收器能够感知光线的有无。光电式接近觉传感器由发光二极管和光敏晶体管组成,采用最简单的光强法检测。发光光二极管发出的光经过反射被光敏晶体管接收,接收到的光强和传感器与目标的距离有关。
输出信号的大小反映了从目标物体反射回接收元件的光强。这个信号的大小不仅与检测距离有关,同时也受被测物体表面光学特性和表面倾斜等因素的影响。将红外信号调制成某一特定频率,可大大提高信噪比。

移动机器人采用光电式接近传感器检测货物位置
光电式接近觉传感器具有测量速度快、抗干扰能力强、测量点小、适用范围广等优点,是目前机器人中应用最多的接近觉传感器。
移动机器人采用光电式接近传感器检测货物位置
2 力觉传感器
力觉传感器根据力的检测方式不同,可分为应变片式、利用压电元件式及差动变压器、电容位移计式。其中,应变片式压力传感器应用最普遍,商品化的力觉传感器大多是这一种。
压电元件很早就用在刀具的受力测量中,但它不能测量静态负载。电阻应变片式压力传感器是利用金属拉伸时电阻变大的现象,将它粘贴在加力方向上,可根据输出电压检测出电阻的变换。通过电阻应变片可以将试件的应变转换成应变片的电阻变化,通常这种电阻变化很小。测量电路有多种,惠斯登电桥电路是最常用的电路。
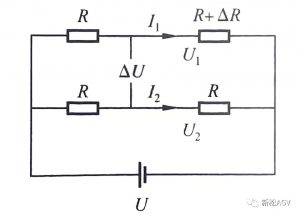
惠斯登电桥电路放大应变片的微弱变化
在不加力时,点桥上的电阻都是R,当应变片受力时,电阻应变片产生一个很小的电阻变化,则输出电压为:

移动机器人采用力觉传感器检测货物重量
3 视觉传感器
(1)单目摄像头
单目摄像头即具有一个镜头的摄像头,它无法直接获得目标的三维坐标,只能提取目标物体的特证,得到目标物体在二维平面内的相对位置。

移动机器人采用单目摄像头获取位置信息
(2)双目摄像头
双目摄像头具有两个镜头,可理解为两个单目摄像头的结合,主要应用于提取出目标的三维坐标,这些信息可以直接调整机器人在运动中的运动参数。但是传统的三维提取首先需要知道摄像机的准确焦距信息,针对该摄像头的变参数进行图像校正;然后对左、右摄像机分别采集到的图像中的目标特征点进行匹配;最后利用其相互关系推算出目标点的深度信息。
移动机器人采用双目摄像头检测物体深度信息
(3)云台摄像头
云台是安装、固定摄像机的支撑设备。电动云台适用于对大范围进行扫描监视,它可以扩大摄像机的监视范围。该云台内装两个电动机,这两个电动机一个负责水平方向的转动,另一个负责垂直方向的转动。
每种传感器都有各自的优缺点,在移动机器人的设计过程中就是要确定需要哪种传感器或具体应用哪种传感器最合适。



混合供电和无线充电技术")

